")
")
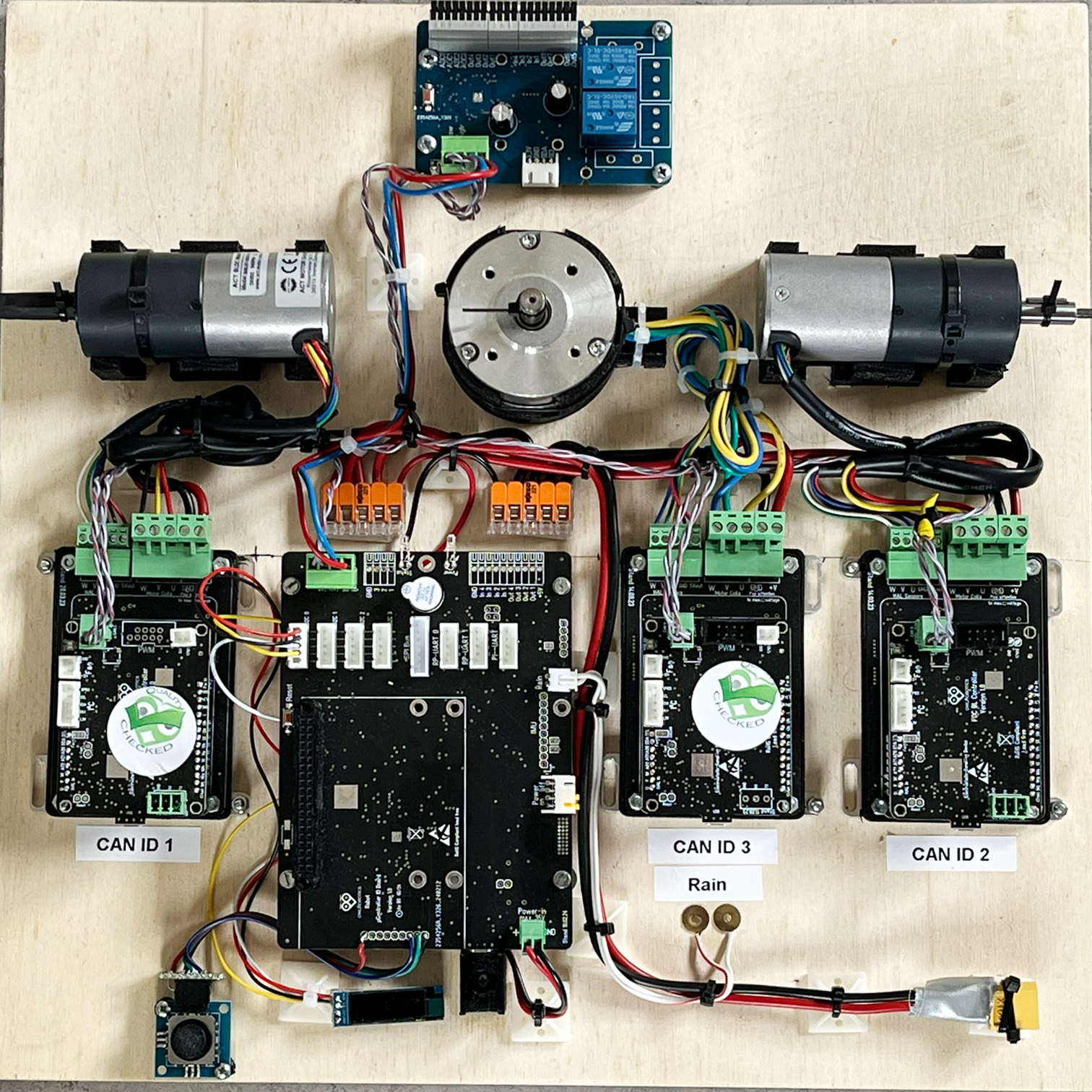
Zur Entwicklung und Überprüfung der Softwarekomponenten erfordert der Einsatz von Robotern oft einen erheblichen Aufwand. Daher haben wir die Strategie verfolgt, die Komponenten auf einem Testbrett zu montieren, um Motoren, Sensoren und andere Teile direkt am Schreibtisch zusammen mit der Software auf Funktion zu testen. Unser Testbrett zeigt eine Konfiguration eines typischen Mähroboters mit 3 Motoren, dem zentralen owlController (ein großes Board) und einem zusätzlichen Sensor- und IO-Board. Für die Steuerung der bürstenlosen Motoren verwenden wir unsere bewährten owlDrive BL-Controller. Das zentrale Steuerungsboard, auf das ein Raspberry Pi gesteckt wird, ermöglicht die Hardware-nahe Kommunikation. Es steuert externe Module über den CAN-Bus und kann über I²C-Stecker zusätzliche Sensoren zur Verfügung stellen. Darüber hinaus stellt es digitale IO-Pins sowie Analogeingänge zur Verfügung, um Schalter für Bumper und ähnliche Funktionen abzufragen. Ein spezieller Analogeingang ist für einen Regensensor ausgelegt. Wenn die vorhandenen IO-Ports nicht ausreichen, können über den CAN-Bus weitere IO-Module angeschlossen werden, wie das blaue Modul am oberen Rand, das auch über 2 Relais verfügt. Durch diese modulare Vernetzung können bis zu 60 Module miteinander verbunden werden, um beispielsweise auch 4 Radantriebe oder Werkzeuge mit mehreren Motoren zu steuern. Mit dem owlRobotics Kit sind wir in der Lage, jede Hardwareanforderung zu konfigurieren und einfach zu steuern. Diese Basissteuerung kann dann vom Robot Operating System (ROS), das auf dem aufgesteckten Raspberry Pi läuft, angesteuert und mit einer standardisierten ROS-Anwendung genutzt werden.